ربات Report به دلیل داشتن جدید مدل خاویر جتسون AGX که امیدوار است به مغز اصلی ربات های نسل بعدی تبدیل شود ، انویدیا را به عنوان یک شرکت رباتیک که باید در سال 2019 تماشا کند ، نامید. اکنون حتی دلیل بیشتری برای تحت نظر داشتن حرکت های رباتیک انویدیا وجود دارد: سازنده تراشه مستقر در سانتا کلارا ، کالیفرنیا ، تازه ترین آزمایشگاه تحقیقاتی رباتیک کامل خود را افتتاح کرد.
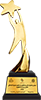
آزمایشگاه رباتیک انویدیا که در سیاتل واقع شده است و فقط با یک پیاده روی از دانشگاه واشنگتن فاصله دارد ، وظیفه دارد تحقیقات پیشرفته ای را انجام دهد تا ربات های مشترک نسل بعدی را که به صورت قوی و ایمن در بین مردم کار می کنند ، فعال کند. آزمایشگاه رباتیک انویدیا توسط دیتر فاکس ، مدیر ارشد تحقیقات رباتیک در انویدیا و استاد دانشکده علوم و مهندسی کامپیوتر پل جی آلن UW هدایت می شود.
فاکس گفت: "همه اینها در تلاش است تا نسل بعدی دست اندازهای هوشمند را که می توانند در محیطهای باز نیز کار کنند ، انجام دهند. "با جمع آوری پیشرفتهای اخیر در درک ، کنترل ، یادگیری و شبیه سازی ، می توانیم به جامعه تحقیقاتی در حل برخی از بزرگترین چالشهای رباتیک کمک کنیم."
این آزمایشگاه 13000 فوت مربع میزبان 50 متخصص رباتیک است که متشکل از 20 محقق انویدیا به علاوه بازدید از اساتید و کارورزان از سراسر جهان است. انویدیا می خواهد ربات ها بتوانند به طور طبیعی در کنار افراد در محیط های بدون ساختار دنیای واقعی کارهایی را انجام دهند. برای انجام این کار ، ربات ها باید بتوانند آنچه را که شخص می خواهد انجام دهد درک کنند و نحوه کمک به رسیدن به هدف را بفهمند.
ایده آزمایشگاه رباتیک انویدیا در تابستان 2017 در هاوایی مطرح شد. فاکس و مدیر عامل انویدیا جنسن هوانگ در CVPR ، یک کنفرانس سالانه بینایی رایانه ، ملاقات کردند و در مورد مناطق مهیج و مشکلات دشوار جاری در رباتیک گفتگو کردند.

"انویدیا خود را وقف حل چالش های بسیار دشواری می کند که رایانه می تواند حل کند. و رباتیک بدون شک یکی از مرزهای نهایی هوش مصنوعی است. این به همگرایی بسیاری از انواع فن آوری ها نیاز دارد. ”هوانگ به The Robot Report گفت. "ما می خواستیم خودمان را وقف کنیم و در زمینه رباتیک سهیم باشیم. در طول مسیر ، انواع علوم کامپیوتر عالی و دانش AI را از بین خواهد برد. ما واقعاً امیدواریم که فناوری ایجاد شده بتواند از صنایع از مراقبت های بهداشتی تا تولید تا حمل و نقل و تدارکات پیشرفت چشمگیری داشته باشد.
انویدیا گفت که در حال حاضر حدود دوازده پروژه در حال انجام است و انویدیا مقالات پژوهشی خود را با منبع باز باز می کند. فاکس گفت انویدیا در درجه اول علاقه مند است ، حداقل در اوایل ، به اشتراک گذاری توسعه نرم افزار خود را با جامعه رباتیک. فاکس گفت: "برخی از تکنیک های اصلی که در نمایش آشپزخانه می بینید در اجزای کاملاً محکم پیچیده خواهد شد.
ما در افتتاحیه رسمی آزمایشگاه تحقیقات رباتیک انویدیا شرکت کردیم. اینجا یک نگاه داخلی است.
دستکاری کننده موبایل در آشپزخانه

دستیار موبایل انویدیا شامل یک (کوبوت فرانکا امیکا پاندا) در Segway RMP 210 UGV است.
منطقه اصلی آزمایش در آزمایشگاه رباتیک انویدیا آشپزخانه ای است که شرکت از IKEA خریداری کرده است. یک دستیار موبایل ، متشکل از بازوی cobot Franka Emika Panda بر روی Segway RMP 210 UGV ، تلاش خود را برای کارهای سخت تر انجام خواهد داد ، از بازیابی اشیا from از کابینت گرفته تا یادگیری نحوه تمیز کردن میز ناهار خوری گرفته تا کمک به شخص در پختن غذا. .
در هنگام خانه باز ، دستیار موبایل مرتباً اشیا را می آورد و آنها را درون کشو قرار می داد ، کشو را با گیره باز و بسته می کرد. فاکس اعتراف کرد این اولین کار تا حدودی آسان است. این ربات از یادگیری عمیق برای شناسایی اشیا specific خاص فقط بر اساس شبیه سازی خود استفاده می کند و نیازی به برچسب گذاری دستی داده ها ندارد. این ربات از سیستم عامل NVIDIA Jetson برای پیمایش استفاده می کند و برای پردازش و دستکاری در پردازنده های گرافیکی NVIDIA TITAN در زمان واقعی نتیجه گیری می کند. سیستم درک مبتنی بر یادگیری عمیق با استفاده از چارچوب یادگیری عمیق PyTorch تسریع شده در cuDNN آموزش داده شد.
فاکس همچنین به روشنی توضیح داد که چرا انویدیا انتخاب کرده است یک دستکاری موبایل را در آشپزخانه آزمایش کند. فاکس گفت: "ایده انتخاب آشپزخانه به این دلیل نبود که ما فکر می کنیم آشپزخانه برنامه قاتل در خانه خواهد بود." "این واقعاً ایستادگی در این دامنه های دیگر بود." آشپزخانه یک محیط ساختاری است ، اما فاکس گفت که به راحتی می توان متغیرهای جدیدی را در قالب کارهای پیچیده تر مانند برخورد با اشیا ناشناخته یا کمک به شخصی که در حال پختن یک وعده غذایی است ، به ربات معرفی کرد. "
برآورد ژست شی عمیق

NVIDIA سیستم Deep Object Pose Estation (DOPE) خود را در اکتبر 2018 معرفی کرد و در سیاتل به نمایش در آمد. با استفاده از الگوریتم NVIDIA و یک تصویر واحد ، یک ربات می تواند حالت سه بعدی یک شی را به منظور گرفتن و دستکاری استنباط کند. DOPE فقط در مورد داده های مصنوعی آموزش دیده است.
یکی از چالش های کلیدی داده های مصنوعی توانایی پر کردن شکاف واقعیت است به طوری که شبکه های آموزش داده شده روی داده های مصنوعی به درستی با داده های دنیای واقعی کار می کنند. NVIDIA گفت شبکه عصبی عمیق یک شات آن ، البته به صورت محدود ، این مهم را محقق کرده است. این سیستم در دو مرحله به مقاصد خود نزدیک می شود. اول ، شبکه عصبی عمیق نقشه باورهای نقاط کلیدی 2D از همه اشیا in موجود در سیستم مختصات تصویر را تخمین می زند. در مرحله بعدی ، قله های این نقشه های اعتقادی به الگوریتم دیدگاه-نقطه-نقطه (PnP) استاندارد برای تخمین موقعیت 6-DoF هر نمونه شی منتقل می شوند.

گیرنده ReFlex TakkTile 2 از RightHand Robotics.
حس لمسی
NVIDIA دارای دو دمو بود که حس لمسی را به نمایش می گذارد ، که عنصری از دست رفته برای گیرنده های رباتیک تجاری است. یکی از نسخه های نمایشی شامل یک گیرنده ReFlex TakkTile 2 از شرکت RightHand Robotics بود که اخیراً 23 میلیون دلار برای فناوری جمع آوری قطعات خود جمع کرده است. ReFlex TakkTile 2 یک گیرنده رباتیک سازگار با ROS با سه انگشت است. گیرنده دارای سه DOF خمشی و 1 DOF چرخشی همراه است. از قابلیت های سنجش می توان به سنسورهای فشار عادی ، رمزگذارهای مفصل پروگزیمال چرخشی و IMU سر انگشت اشاره کرد.
نسخه ی نمایشی دیگر ، که توسط کارل ون ویک ، محقق ارشد رباتیک NVIDIA اجرا می شود ، دارای سنسورهای لمسی SynTouch است که به یک دست روباتیک Allegro از Wonik Robotics مستقر در کره جنوبی و یک کوبوت iiwa KUKA LBR تغییر یافته است. "تقریباً احساس حیوان خانگی می شود!" هوانگ در حالی که انگشتان رباتیک را به آرامی لمس می کرد ، باعث عقب کشیدن آنها شد. "این به طور شگفت آور درمانی است. میتوانم یکی از اینها داشته باشم؟"
ون ویک گفت که حسگرهای لمسی در آزمایشگاه های تحقیقاتی وارد دنیای واقعی می شوند. "سخت گیری و ادغام زیادی وجود دارد که باید آنها را در دنیای واقعی تحمل کند ، اما ما در آنجا پیشرفت زیادی داریم. دنیایی که در آن زندگی می کنیم برای ما طراحی شده است ، نه روبات ها. "
KUKA LBR iiwa از هیچ دیدگاهی برای درک محیط خود استفاده نمی کرد. "این ربات نمی تواند ببیند که ما در اطراف آن هستیم ، اما ما می خواهیم آن را به طور مداوم نسبت به محیط خود حس کند و واکنش نشان دهد. بازو در تمام مفاصل حس گشتاور دارد ، بنابراین می تواند احساس کند که من روی آن فشار می آورم و به آن واکنش نشان می دهم. نیازی به دیدن من نیست تا به من واکنش نشان دهد.
"ما یک موتور 16 موتوره داریم که دارای سه انگشت اصلی و یک انگشت شست مخالف است ، بنابراین مانند دست های ماست. دلیل این که می خواهید گیرنده پیچیده تری از این قبیل داشته باشید این است که می خواهید در نهایت بتوانید اشیا in موجود در دست خود را مانند ما به صورت روزانه دستکاری کنید. این بسیار مفید است و حل کارهای جسمی را کارآمدتر می کند. سنسورهای SynTouch اندازه گیری می کنند چه اتفاقی می افتد وقتی ما چیزی را لمس می کنیم و آن را دستکاری می کنیم. خاموش کردن این سنسورها برای کنترل مهم است. اگر بتوانیم جسم را حس کنیم ، می توانیم چسب و محل انگشت را دوباره تنظیم کنیم. "
تعامل انسان و ربات

هوانگ یک سیستم کنترل را آزمایش می کند که یک روبات را قادر می سازد تا حرکات انسان را تقلید کند. (اعتبار: NVIDIA)
نسخه ی نمایشی جالب دیگر "Proprioception Robot" NVIDIA بود که کار دکتر مادلین گانون ، یک طراح چند رشته ای ملقب به "نجوا دهنده ربات" است که در حال ابداع راه های بهتر برای برقراری ارتباط با روبات ها است. با استفاده از یک ABB YuMi دو مسلح و یک مایکروسافت کینکت در کف زیر ربات ، این سیستم حرکات انسان مقابل خود را تقلید می کند.
"با YuMi ، شما برای برنامه ریزی یک ربات نیازی به یک رباتیک ندارید. با استفاده از الگوریتم های تولید شده NVIDIA ، می توانیم تجربه های جذابی با ربات های واقعی داشته باشیم. "
ممکن است درباره کارهای اخیر گانون در مجمع جهانی اقتصاد در سپتامبر 2018 شنیده باشید. او 10 بازوی ربات صنعتی را پشت سر هم نصب کرد و آنها را از طریق کنترل کننده مرکزی به یک اتصال متصل کرد. آنها با استفاده از سنسورهای عمق در پایگاه های ربات ها ، حرکات افراد عبوری را ردیابی و به آنها پاسخ می دادند.
هوانگ گفت: "چیزهای جالبی وجود دارد که ما می توانیم در جستجوی یک ربات کلی هوش مصنوعی چرخش کنیم." "به عنوان مثال ، به احتمال زیاد در آینده نزدیک شما" وسایل نقلیه خارجی "در اطراف خود خواهید داشت ، چه اسکلت خارجی باشد یا یک اگزو چیزی که به افراد معلول کمک می کند یا به ما کمک می کند تا از آنچه ما هستیم قوی تر باشیم."
ارسال مطلب به ایمیل دوستاتون: