به نظر میرسد ابداع رباتهای کاملا خودکار، هنوز یک آرزوی دستنیافتنی باشد. شاید بتوان واکنشهای سریع انسانی را به عنوان راه حلی برای پیشگیری از افتادن رباتها به کار برد اما انسانها برای این کار باید بتواند احساس ربات را درک کنند.
رباتهای دو پا، فناوری کارآمدی برای مسیریابی در محیطهای انسانی هستند اما بیش از رباتهای چهار پا یا چرخدار، در معرض افتادن هستند. اگرچه این رباتها معمولا الگوریتمهای پیچیدهای دارند که به ایستادن آنها کمک میکنند اما الگوریتمها نمیتوانند کارآیی لازم را در همه شرایط داشته باشند.
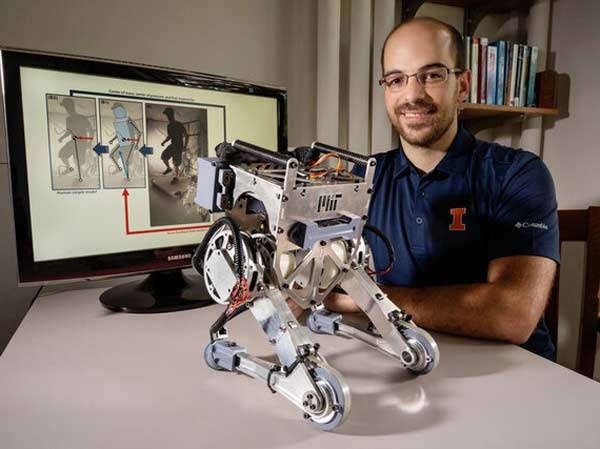
پژوهشگران دانشگاه "ام.آی.تی" (MIT) و "دانشگاه ایلینوی در اربانا- شمپین" (U of I)، یک ربات شبه انسان ابداع کردهاند که بتواند کارآیی بیشتری نسبت به نمونههای مشابه خود داشته باشد.
"جوآ راموس" (João Ramos)، پژوهشگر دانشگاه ایلینوی در اربانا- شمپین و مبدع این ربات گفت: ایده ساخت این ربات، با دیدن زمینلرزه و سونامی توهوکو و حادثه اتمی فوکوشیما در سال ۲۰۱۱ به ذهن ما خطور کرد. ما فکر کردیم اگر یک ربات میتوانست پس از حادثه به نیروگاه وارد شود، شرایط یقینا بسیار متفاوت بود.
رباتی که راموس و "سانگبائی کیم" (Sangbae Kim)، پژوهشگر دانشگاه ام.آی.تی ابداع کردهاند، یک ربات کوچک دو پا موسوم به "هرمس کوچک" (Little Hermes) است که مستقیما به یک اپراتور انسان متصل میشود. اپراتور، روی یک صفحه حسگر فشار میایستد و یک جلیقه برای بازخورد نیرو نیز میپوشد.
ربات، از حرکات اپراتور انسان پیروی میکند و پس از تحلیل حرکات او، کارهایی مطابق آنها را به صورت خودجوش انجام میدهد.
اگر ربات با شیب یا مانعی غیرمنتظره رو به رو شود، نیروهایی از طریق جلیقه اپراتور به آن منتقل می شوند و ربات با احساس فشار، واکنش مناسب را نشان میدهد. با این سیستم، ویژگی خاصی مانند غریزه حیوانات در ربات شکل میگیرد.
شاید این فناوری بتواند به عملکرد بهتر رباتهای امداد و نجات در محیطهای غیر قابل اطمینان کمک کند. پژوهشگران قصد دارند سیستمهای بازخورد را در دستها و پاهای ربات نیز قرار دهند تا امکان عملکرد بهتر آن را فراهم کنند.