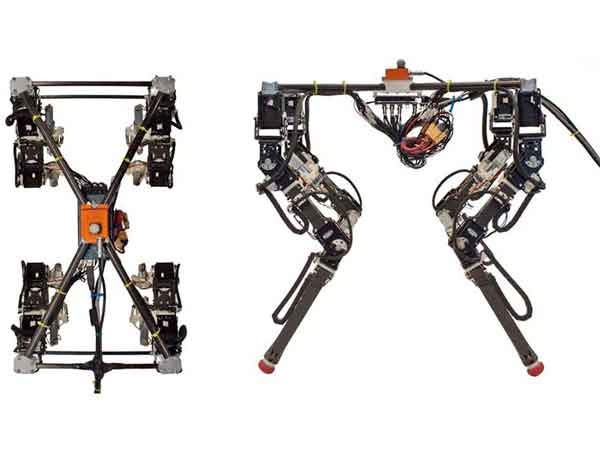
ربات چهارپایی به نام Dyret طراحی و تولید شده است که میتواند بهراحتی و بدون لیز خوردن، روی هر سطحی از جمله برف و یخ راه برود و تعادل خود را حفظ کند.
آیا رباتها میتوانند روی سطوح لغزنده مانند برف و یخ راه بروند و تعادل خودشان را حفظ کنند؟ ربات چهارپا به نام Dyret میتواند بهراحتی روی سطوح مختلف از جمله برفی و یخ راه برود و زمین نخورد. شاید وقتی برای اولین بار Dyret را ببینید، از طراحی عجیب آن کمی شگفتزده شوید؛ ولی مهارتهای این ربات چهارپا میتواند نظر شما را عوض کند. Dyret بامهارت عجیبی روی سطوح لغزنده راه میرود و نهتنها زمین نمیخورد، بلکه سرعت خوبی دارد و سریع راه رفتن روی آن سطح را یاد میگیرد. جالب است بدانید این ربات به خودش راه رفتن را آموزش میدهد و به گفته محققان رباتیک، Dyret جزو رباتهای تکاملی است.
رباتهایی مانند Cassie که دارای دو پا است یا سگ ربات SpotMini به لطف الگوریتمهای دقیق، بهسرعت میتوانند در حرکت کردن مسلط شوند. ولی این ربات جدید با بقیه رباتهای نسل قبلی تفاوت دارد. ربات Dyret یاد میگیرد روی یک سطح خاص، مثلا فرش یا یخ با روش آزمون و خطا گام بردارد و گامهایش را با محیطی که در آن قرار گرفته، سازگار میکند. رباتهای صنعتی، معمولا با کمک تغییر در کدها و الگوریتمهایشان میتوانند برای راه رفتن تنظیم شوند؛ ولی این ربات بهصورت اتوماتیک خود را با شرایط تنظیم و سازگار میکند. بازوهای ربات با توجه به شرایط محیطی میتوانند بهصورت اتوماتیک کوتاه یا بلند شوند و همین مسئله باعث حفظ تعادل ربات خواهد شد. در اصل Dyret مرکز ثقل خودش را با توجه به سطحی که روی آن قرار دارد و با تغییر طول دستها و پاهایش تنظیم میکند و همین دلیل در دسته رباتهای تکاملی قرار میگیرد. در نهایت باید بگوییم این ربات میتواند بهراحتی روی سطوح مختلف با اقتدار و بدون نیاز به کمک راه برود و تعادل خود را حفظ کند.
سیستمهای مصنوعی کاملا شبیه به موجودات زنده، در حال تکامل هستند و میتوانند از قواعد انتخاب طبیعی همانند موجودات زنده پیروی کنند. این ساختار و ارگانیزمهای غیر زنده همانند موجودات زنده میتوانند دچار جهش ژنتیکی شوند و تکامل پیدا کنند و با محیط اطراف خود در تعامل بهتری قرار گیرند. برای اینکه ربات Dyret بتواند بهدرستی راه برود، محققان در طراحی آن هشت راهکار مختلف را مورد بررسی قرار دادند که یکی از این راهکارها، تغییر طول بازوی ربات برای حفظ تعادل در حین راه رفتن است. البته محققان از همه این راهکارها به شکلی در طراحی خود استفاده کردهاند و محصول نهایی ترکیبی از این روشها با یکدیگر است. تونس نیگارد از متخصصان علم رباتیک دانشگاه اسلو که در پروژه شناخت و بررسی پیشبینی پذیری رباتها مشغول فعالیت است، میگوید:
در ساخت رباتها عموما چندین راهکار ترکیبی مورد استفاده قرار میگیرد تا راهکاری جدید برای طراحی و تولید نسل جدید رباتها قابل استفاده شود. این کار شبیه به تولد فرزند جدید برای پدر و مادرش است. برنامهای که این ربات را قدرتمند میسازد، در اصل باعث اصلاح و تغییر تکاملی ربات شده و این کار شبیه به جهش ژنتیکی در طبیعت است.
Dyret تلاش میکند تا اندامهای خودش را به شکلی تنظیم کند که بتواند بهراحتی روی هر سطحی راه برود. وقتی روی هر سطحی قرار میگیرد بهسرعت به خودش یاد میدهد گامهایی متعادل و بدون لغزش روی آن سطح بردارد و بهسرعت راه رفتن روی سطح جدید را یاد میگیرد. سنسوری در قسمت بالایی ربات تعبیه شده است که وضعیت حرکت کردن پایدار و در حال تعادل ربات را رصد میکند. راهکارهای خوب همیشه امتیاز و نمره خوبی کسب میکنند. نیگارد معتقد است:
همیشه شانس بیشتری برای طراحی و ساخت رباتی با تعادل بیشتر و سریعتر وجود دارد.
رباتها میتوانند از نسلی به نسل بعدی بهبود پیدا کنند و با هر محیطی سازگارتر شوند. Dyret هم از همین قاعده پیروی میکند و وقتی قرار است روی سطح جدیدی راه برود، بلافاصله یاد میگیرد تعادل خودش را حفظ کند و سریع خود را با محیط سازگار میکند. حتی اگر سطح لغزنده باشد، این ربات بهراحتی خود را برای راه رفتن روی آن سطح تنظیم میکند. نیگارد اضافه میکند:
وقتی Dyret را روی سطحی میگذاریم تا راه برود، ربات نمیداند ما سطح زیر دستها و پاهایش را تغییر دادهایم. بلکه خیلی ساده تلاش میکند تا با توجه به شرایطی که در آن قرار دارد، با حفظ تعادل و البته سریع حرکت کند و راه برود.
برای آنکه Dyret بتواند روی هر سطحی راه برود و تعادلش حفظ شود تغییراتی در اندامهای بدن خودش ایجاد میکند. هر کدام از پاهای این ربات میتواند تا ۵ اینچ بلندتر شود. لذا وقتی نیگارد، ربات را روی برف میگذارد، ربات پاهای خودش را کوتاهتر میکند تا بتواند بهتر روی برف حرکت کند و راه برود. به شکلی باور نکردنی، Dyret تعادل خودش را روی برف حفظ میکند و حتی در حین راه رفتن سرعتش خیلی کاهش پیدا نمیکند. نیگارد میگوید:
وقتی پاهای ربات بلند باشد، از آنجایی که مرکز ثقل ربات بالاتر از سطح زمین قرار دارد، نیروی پتانسیل در آن قسمت افزایش پیدا میکند و میزان پایداری و تعادل کم میشود و به همین دلیل ربات پاهای خودش را کوتاهتر میکند. برعکس وقتی این ربات میخواهد روی سطحی مانند فرش که اصطحکاک بیشتری دارد، راه برود، پاهای خودش را بلندتر میکند و گامهای بلندتری برمیدارد. در طراحی این ربات، سعی کردیم نیروی گشتاور چرخشی موتورها را تغییر دهیم، این تغییر وضعیت وقتی باتری در حال خالی شدن است، بهصورت طبیعی رخ میدهد در نهایت متوجه شدیم که وقتی ربات قدرت (پاور) بیشتری در اختیار دارد، طول پاهای ربات بلندتر است. مجددا این وضعیت باعث میشود که ربات بتواند گامهای قوی و استوارتری بردارد. اما وقتی میزان قدرت ربات افت میکند، ربات پاهای خودش را کوتاه کرده و سعی میکند تا در عوض سرعت خودش را بالا ببرد.»
در نهایت با کنار هم قرار دادن همه این موارد، باید بگوییم که Dyret، میتواند روی هر سطحی بهراحتی و در تعادل کامل و بدون اینکه لیز بخورد راه برود و خودش را با محیطها و شرایط مختلف سازگار کند. حتی اگر این شرایط، وضعیتی مثل کم شدن شارژ باتری ربات باشد، باز هم Dyret راهکاری برای آن در نظر میگیرد و با کوتاه کردن پاهایش تعادل و سرعت حرکت خود را حفظ میکند. این ربات هر ضعفی را به قدرت تبدیل میکند و تحت هیچ شرایطی در برابر شرایط نامناسب متوقف نمیشود.
نیگارد میگوید:
اگر به من الگوی کامل راه رفتن داده شود در عرض یک هفته میتوانم ربات بسازم.
رباتهای تکاملی مانند Dyret به دلیل اینکه قدرت اصلاح کردن راه رفتن و گام برداشتن خود را در اختیار دارند، میتوانند تعادل خود را حفظ کرده و روی هر سطحی حرکت کنند. نیگارد معتقد است رباتهای سنتی چنین قابلیتی ندارند. این پلتفرم جدید میتواند همچون کودک نوپایی یاد بگیرد راه برود و اشکالات موجود در راه رفتن خودش را اصلاح کند. یکی از دانشمندان علوم کامپیوتر دانشگاه آمستردام سئوال مهمی را مطرح میکند:
چرا حرکت در مسیر تکامل اینقدر مهم است؟ دو پاسخ برای این سئوال وجود دارد. پاسخ اول این است که ما میدانیم تحول کارساز است و همه ما در حال تکامل هستیم و دوم اینکه گاهی اوقات در رویکردهای معمول، تنها راه چارهی کارساز میتواند حرکت کردن در مسیر تکامل باشد.
برای اینکه رباتها بتوانند با جهان اطرافشان در تعامل باشند، باید مسیر تکامل را طی کنند تا بتوانند در شرایط مختلف محیطی هم به کار خود ادامه دهند. رباتهای تکاملی باید بتوانند روی یخ، روی برف، روی سنگ یا روی سنگریزهها هم راه بروند و تعادل خودشان را حفظ کنند. رباتها باید یاد بگیرند رفتارهای حرکتی خود را اصلاح کنند تا با جهان اطرافشان در تعامل نزدیکتر و بهتری قرار گیرند.
ارسال مطلب به ایمیل دوستاتون: